Article 28
 Pour cet article,
consultez également le courrier des lecteurs
Pour cet article,
consultez également le courrier des lecteursComprendre l'électronique par la simulation. par Serge Dusausay Espace lecteur plan du site
Article 28 |
Quelques informations supplémentaires des pages 169 à 176 du livre. |
| Pour cet article,
consultez également le courrier des lecteurs | |
|
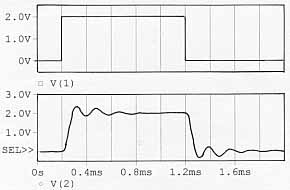
Ce complément d'article traite la mise en oeuvre d'un correcteur PID. Le système à asservir est du 3 ème ordre. Il modélise le processus équipé de son capteur de chaîne de retour. L'entrée est une tension, la sortie est une tension. On se propose de ne présenter ici que les grandes lignes principales : 1) de tester le processus seul et de comparer avec la simulation, 2) de simuler le circuit dans un asservissement avec un correcteur Kp réglé à la valeur dite de "juste oscillation", 3) d'en déterminer les coefficients du PID (méthode de Ziegler et Nichols), 4) de simuler le système corrigé, 5) de rechercher une amélioration de la réponse, à l'aide de la simulation. 6) Essai pratique. |
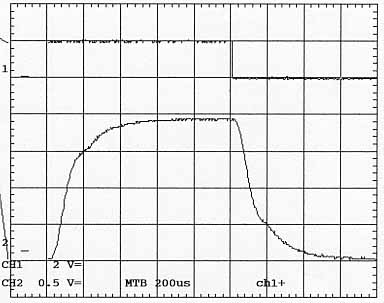 | ||
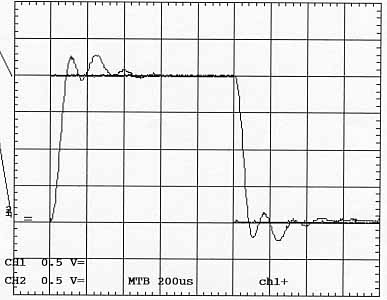
| Réponse à l'échelon du système du 3 ème ordre seul, réel | ||
| 200 us / carreau | haut : CH1 : 2 V / c | bas : CH2 : 0,5 V / c |
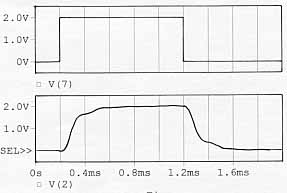 |
| Réponse à l'échelon du système du 3 ème ordre seul, simulé |
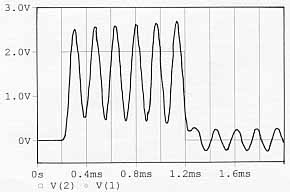 |
| Réponse temporelle simulée, système juste oscillant |
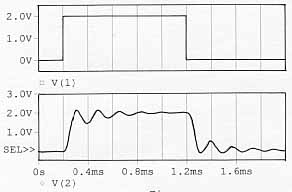 |
| Réponse temporelle simulée, processus dans un asservissement avec PID déterminé par Ziegler et Nichols. |
 |
| Réponse temporelle simulée, processus dans un asservissement avec PID optimisé. |
 | ||
| Réponse à l'échelon du système bouclé avec PID optimisé | ||
| 200 us / carreau | CH1 : 0,5 V / c | CH2 : 0,5 V / c |
fin de l'article 28
lire le courrier des lecteurs sur cet article